


Description
CANBed Dual is a CAN Bus development board with 2 independent CAN FD interfaces based on RP2040. It uses GD32E103CBT6 as the CAN controller with an operating frequency is up to 133MHz, which is suitable for most embedded applications.
Features
- High Performance: Powered by RP2040 with 264KB of SRAM, and 2MB of onboard Flash memory
- Support two CAN protocols: CAN-FD and CAN 2.0
- CAN controller: GD32E103CBT6, dual-core ARM Cortex M0+ processor, flexible clock running up to 133 MHz
- Multiple interfaces: One I2C, One UART, One 2×3 Pin SPI Interface
Here is a new member of the CAN Bus family in Seeed, let’s shed some light on CANBed DUAL!
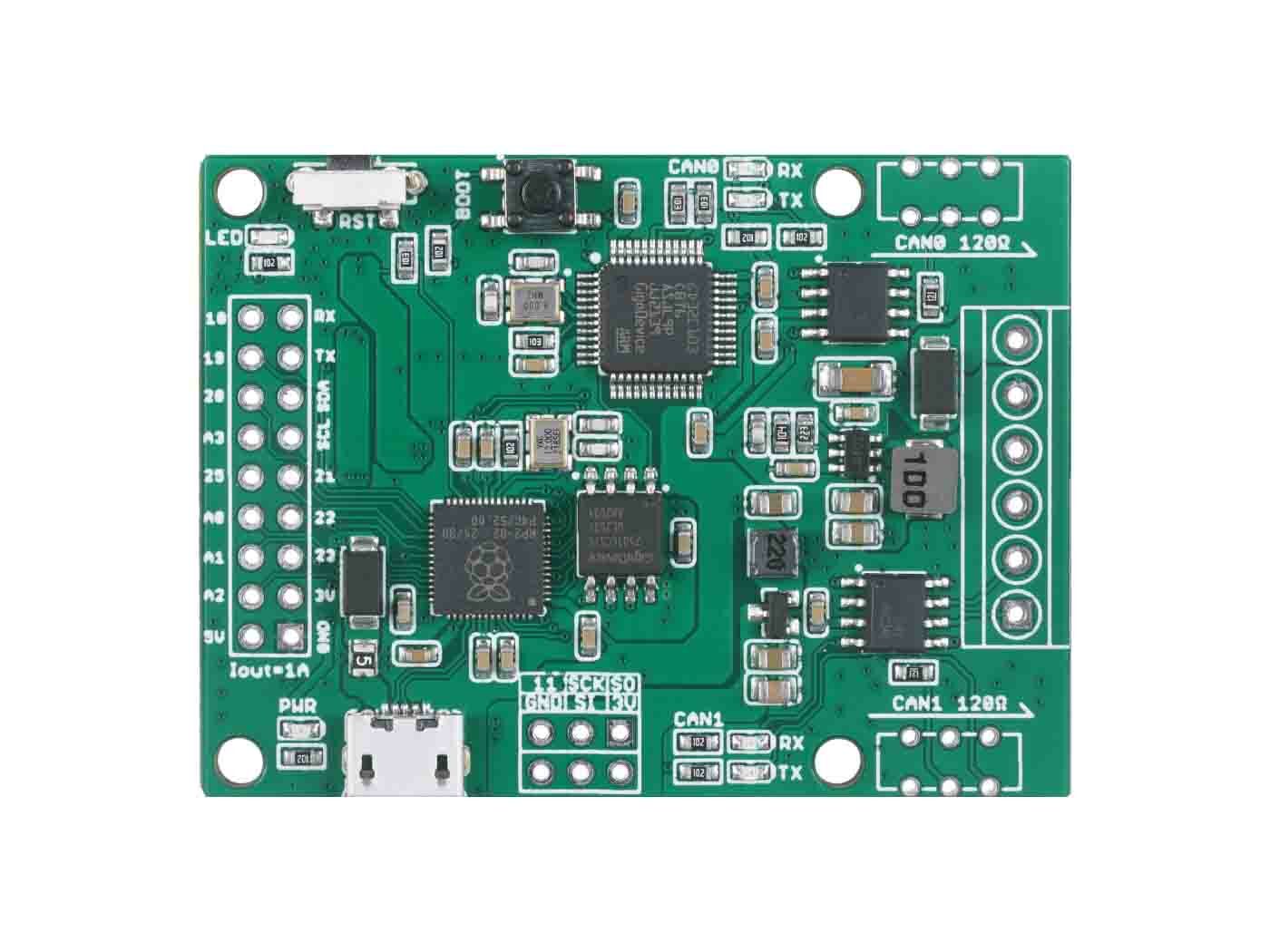
CANBed DUAL, a CAN Bus development board, is based on the RP2040 chip which is the debut microcontroller from Raspberry Pi. It brings signature values of high performance, low cost, and ease of use to the microcontroller space. There are 264 KB of SRAM and 2MB of Flash memory on board. The operating frequency is up to 133MHz, and it contains a 6PIN Terminal and a flexible Micro USB connector where you can either program the board or supply power to the board. The voltage input range is 9-28V which provides a stable 5V/1A output. There are also rich interfaces on board including one I2C, one UART, one SPI interface, three analog input interfaces, and eight digital IO
CANBed DUAL has two independent CAN Bus interfaces which are CAN2.0 and CAN FD, and it uses high-performance GD32E103CBT6 as the CAN controller. With CANBed Dual, you can learn CAN Bus communication, build product prototypes and read the data from the car. Also, as a part of your product, it integrates the processes of designing the MCU and the CAN Bus, and you only need to complete other hardware designs.
What is CAN-BUS?
CAN stands for Controller Area Network, it is used to allow microcontrollers and devices to communicate with each other within a vehicle without a host computer which allows for control and data acquisition. These devices are also called Electronic Control Units (ECU) and they enable communication between all parts of a vehicle.
Today, you can find up to 70 ECUs in a modern car. CAN is a serial communication bus designed for industrial and automotive applications. For example, they are found in vehicles, farming equipment, industrial environments, etc.
How does CAN-BUS work?
The fuel level, door sensors, odometer, and many more parts of a car have to communicate with each other somehow, and CAN BUS is what they used to do. These CAN-compatible components, called “nodes” are connected with a 3-string copper wire, with no central router to govern the data flow. Every node can hear the messages of every other node.
Every node has an ID, where the ones with the higher priority ID can have the priority to “talk” first while the others “listen”. This is to ensure that there are never two nodes talking at the same time. The most significant benefit of CAN-BUS is to be able to just connect components without having to worry about signal routing.
Learn more about CAN-BUS here.

Applications
-
Learn CAN Bus communication
-
Read the data from the car
-
Build product prototypes
Specification
|
Parameter |
Details |
|
MCU |
RP2040 |
|
Processor |
Dual ARM Cortex-M0+ |
|
Clock Speed |
flexible clock running up to 133MHz |
|
Flash Memory |
2MB |
|
RAM |
264KB |
|
Operate Voltage |
9-28V |
|
Output Current @3.3V |
1A |
|
Input Interface |
sub-D |
Hardware Overview

CAN Bus Family in Seeed

CAN-BUS series product selection reference is provided here. The table compares NEW-Release Wio-E5 CAN, CANBed v1, CANBed FD, CANBed M4, and CANBed RP2040 in terms of MCU, protocol, memory, interface, etc.
|
Items |
CANBed Dual |
|||||
|
MCU |
Wio-E5 (STM32WLE5JC) |
ATmega32U4(with Arduino Leonardo bootloader) |
ATmega 32U4 (with Arduino Leonardo bootloader) |
ATSAME51 32bit Cortex M4 core |
RP2040 |
RP2040 (Dual ARM Cortex-M0+) |
|
Clock Speed |
up to 48MHz |
16MHz |
16MHz |
120MHz |
up to 133 MHz |
133MHz |
|
Protocol |
Long Range,RS485,CANFD & CAN2.0 |
CAN2.0 |
CANFD & CAN2.0 |
CANFD & CAN2.0 |
CAN2.0 |
CANFD & CAN2.0 |
|
Flash Memory |
256KB |
32KB |
32KB |
512KB |
2MB |
2MB |
|
SRAM |
64KB |
2.5KB |
2.5KB |
192KB |
264KB |
264KB |
|
EEPROM |
– |
1KB |
1KB |
– |
– |
|
|
Operate Voltage(CAN-BUS) |
4.5~28V |
9-28V |
7-28V |
7~28V |
9-28V |
9-28V |
|
Operate Voltage (MicroUSB) |
5V |
5V |
5V |
5V |
3.3V |
5V |
|
Lipo Battery |
3.7V |
– |
– |
– |
– |
– |
|
Input Interface |
9 pin sub-D or 4PIN Terminal |
9 pin sub-D or 4PIN Terminal |
sub-D or 4PIN Terminal |
sub-D as well as Terminal |
sub-D |
Sub-D |
|
Price |
$39.90 |
$24.90 |
$17.90 |
$19.90 |
$15.90 |
$14.9 |
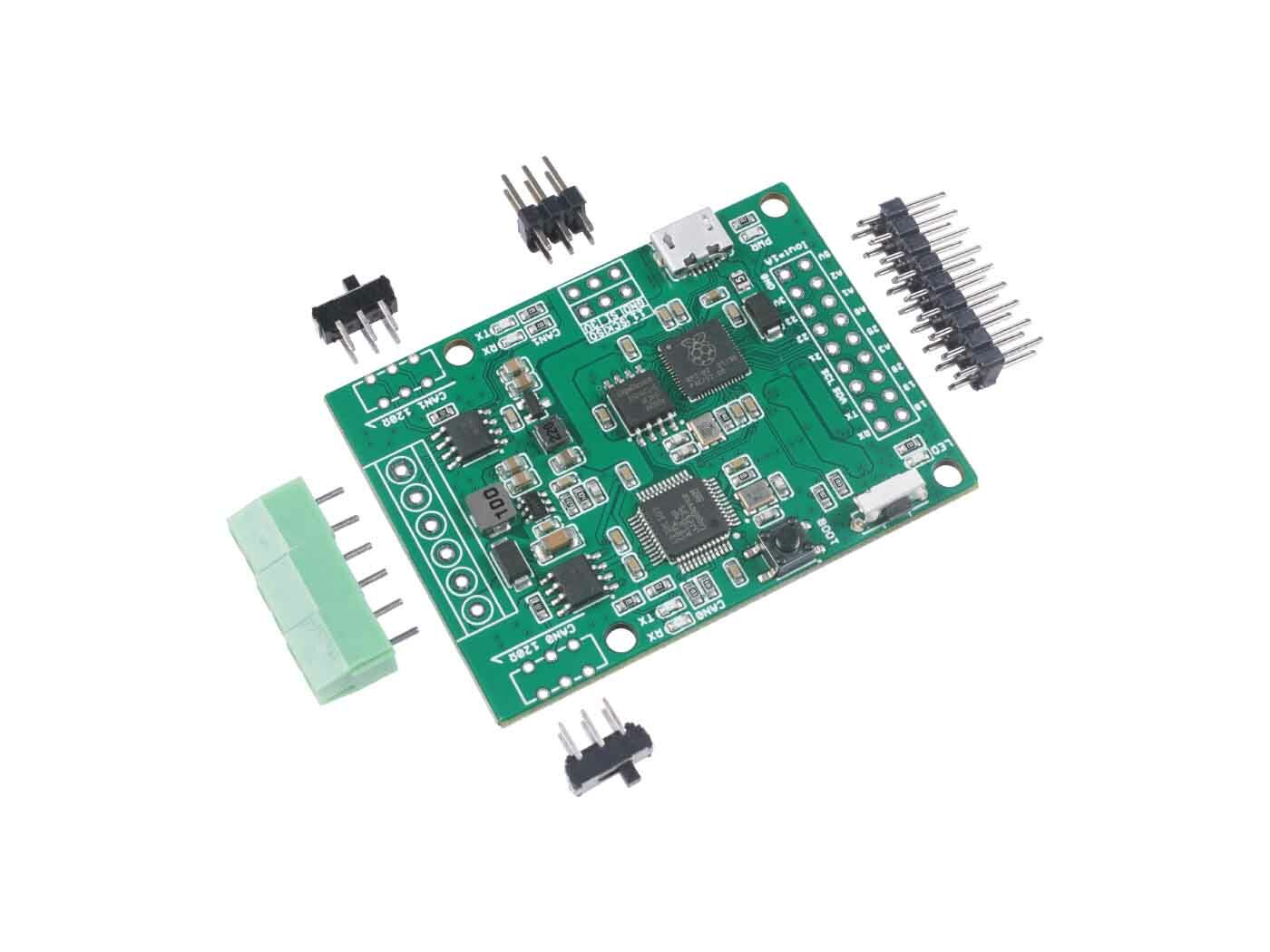
Partlist
|
CANBed Dual PCBA |
1 |
|
6 Pin Terminal connector |
1 |
|
6 Pin Switch |
2 |
|
9×2 2.54 Header |
1 |
|
3×2 2.54 Header |
1 |

Reviews
There are no reviews yet.