

Description
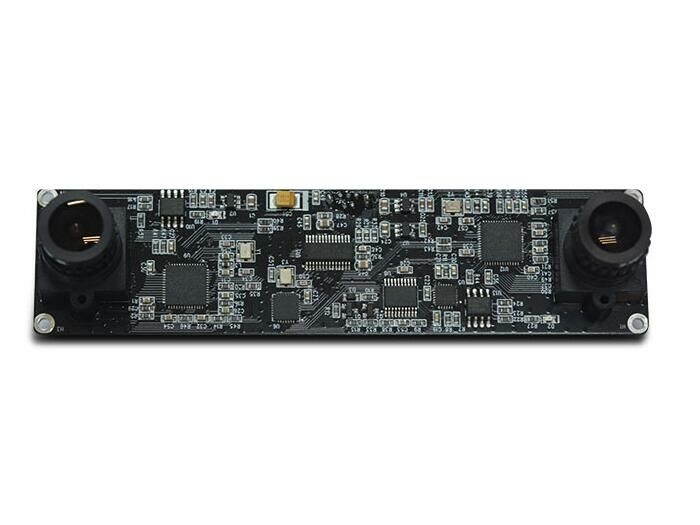
Optor Visual Inertial Camera is a general vision sensor designed for visual algorithm developers.Providing abundant hardware control interface and data interface aimed to reduce development threshold with reliable image and inertial data.
Hardware Specifications
-
Physical Dimensions

-
Camera Coordinate System between Left camera and IMU


-
Hardware Performance and Specifications
|
CMOS |
IMU |
|
|
Type |
MT9V034 |
MPV-6050 |
|
Exposure Mode |
Global shutter |
– |
|
Controller IC |
CY68013 |
STM-32 |
|
FPS |
24-65fps |
200fps |
|
Supported Resolution |
320*240/640*480/752*480 |
– |
|
Firmware Update |
Firmware Update Supported By Windows Software |
– |
|
Baseline |
10cm |
– |
|
Lens physical interface |
M12 Lens interface |
– |
|
Lens Specifications |
2.1mm/150º+6mm/60º |
– |
|
Data interface |
Usb 2.0 |
|
|
Data Delay |
(1/Current_FPS)s |
100us |
|
Frame Synchronization |
Stereo Synchronization Triggered By Camera Driver |
– |
Product Feature
-
IMU zero bias calibration program, Zero bias initialization algorithm of DMP, High precision 6-DOF data, Minimum attitude drift.

-
Stereo optical parameters already accurately calibrated

-
The lens seat rifled through special processing, to ensure the camera would not loosen in the long-term delivery and the lens can be replaced.

-
SDK needs no compilation,no special dependency libraries(only relay on libusb)
-
stable and reliable ROS driver
-
Ubuntu 16/14 supported



Reviews
There are no reviews yet.